概要
- 鉄筋コンクリート構造物の配筋検査を効率化する方法の1つとして、3Dデータの活用があります。
- 本記事では、点群を取得するアプリであるPix4D (PIX4Dcatch1+PIX4Dcloud2)とScaniverse3の特徴や精度検証を紹介します。
- 精度検証は、それらのアプリで取得した点群をもとに、3D配筋検査システムModelyで作成した3Dモデルを用いて行いました。
- 柱・梁の鉄筋に対して点群データを取得し、点群データから3Dモデルを作成することで、鉄筋の配筋検査項目である鉄筋間隔、かぶり厚の精度を評価しました。
- Pix4D (PIX4Dcatch+PIX4Dcloud)とScaniverseによる比較や照度の条件による比較も行い、鉄筋間隔が相対誤差0.3Φ以内、かぶり厚が相対誤差0.6Φ以内の結果を得ることができました(ただし、Φは鉄筋径)。

目次
3D点群取得アプリ比較表
3D点群取得アプリ比較表
| Pix4D (PIX4Dcatch+PIX4Dcloud) | Scaniverse | |
| 手法 | LiDAR+フォトグラメトリ | LiDAR+フォトグラメトリ |
| 撮影方法 | ゆっくり動画を撮るように周囲を撮影 | ゆっくり動画を撮るように周囲を撮影 |
| 撮影範囲 | 広範囲も可能 | PIX4Dcatch+PIX4Dcloudよりは狭い範囲 |
| 点群化処理 | クラウド | iPad |
| 撮影時間 | 数分 | 数分 |
| 点群化処理時間 | 約10分 | 約数秒~1分程度 |
| 点群の座標系 | 公共座標系 | 公共座標系 / 相対座標系 |
| 夏場の使用 | データ処理は、クラウド上だが、iPad自体の発熱には夏場の使用時、注意する必要あり | データ処理は、クラウド上だが、iPad自体の発熱には夏場の使用時、注意する必要あり |
| 雨天時の使用 | データの質への影響はほぼない | データの質への影響はほぼない |
| 撮影設定 | 細かい設定(解像度など)も可能 | 設定できない |
| データ容量 | 数10MB〜(撮影枚数が数10枚程度) 数100MB~(撮影枚数が数100枚程度) |
約10MB~ |
| 画像データの出力 | ○ | x |
| スケール | ◎(スケールは安定している) | ○(スケールの誤差が大きい時もあるため、要求精度に応じて、必要に応じて撮影のし直しなどが必要になることもある) |
| 金額 | 有料 撮影自体(PIX4Dcatch)は無料だが、点群化処理(PIX4Dcloud)は有料。 |
無料 |
以下の説明では、Pix4D (PIX4Dcatch+PIX4Dcloud)をPix4Dと記載しています。
また、点群の質は、主に以下の意味になります。
-
- スケールが正しいか
- 3Dモデル化を行う上で十分な点群が取れている(物体の表面が明確かどうか、ノイズが多くないか)
撮影方法・撮影上の注意
- ゆっくり動画を撮るように周囲を撮影する必要があり、対象物からの撮影距離の目安は数m(5m以内) くらいです。
- 動きが速すぎる場合は、点群の質が落ちる場合がありますが、PIX4Dcatch では、素早く撮影を行った場合には画面上に警告が出るので、アプリの指示に従えば問題なく操作できます。
撮影範囲
- Pix4D はある程度広範囲(10m2以上)も可能です。
- ただし広範囲になると、点群化処理時間は長くなりクレジットを多く消費するため、注意が必要です。
- https://support.pix4d.com/ja/hc/articles/360056382772
- Scaniverse は、広範囲(10m2以上)は、処理が難しくなります。。
- 厳密には、LiDAR のみなら処理は可能だが、鉄筋(特に 1cm 程度)の直径程度の大きさを点群化する上ではフォトグラメトリ処理が必要であり、フォ トグラメトリのモードでは広範囲の処理が難しくなります。
- ただし、一括で広範囲で撮るためには、その範囲を歩く必要はあります。

撮影時間・点群化処理時間
- 撮影時間は、Pix4D や Scanivese ともに数分程度です。
- 点群化処理時間は、 Pix4D は約 10 分、Scaniverse は 数秒~1 分程度です。
- 上記時間は、後述の精度検証の状況による時間です。
- 上記時間は、撮影対象規模によっては変わる可能性があります。
点群化処理
- Pix4D は、クラウド上(PIX4Dcloud)にてフォトグラメトリ処理を行い、点群作成を行います。
- Scaniverse は、iPad Pro 内で点群化処理を行うことができます。
点群の座標系
- Pix4D は公共座標(las 形式)、Scaniverse は公共座標(las 形式)または相対座標(ply 形式)が出力可能です。
- Scaniverseにおける公共座標系
- Scaniverseでは、計測時のlocation機能をonにしていただくことで位置データと共にデータを取得できます。
- Scaniverseで出力したlasファイルは、公共座標系での座標値になっています。
夏場の使用
- Pix4D やScaniverse ともに、 iPad Pro の発熱に注意する必要があります。
- Scaniverse は、データ 取得や処理時に発熱するため、撮影間隔を空けるなど注意が必要です。
- Pix4D は、 データ処理をクラウド上(PIX4Dcloud)で行うため、処理による発熱の心配はありませんが、屋外使用時の iPad Pro の発熱には注意する必要があります。
雨天時の使用
- Pix4D やScaniverse ともに、雨天時の使用によるデータの質への影響はほぼありません。
撮影設定
- Pix4D は、細かい設定(解像度など)も可能です。
- Modelyを用いた配筋検査に必要な点群では、解像度:標準 、オーバーラップ:90% を推奨しています。
- 解像度を細かくすれば点群の精度は上がりますが、点群作成までの処理時間が長くなる、または点群の容量が大きくなる可能性があります。そのため、用途に応じて適切な設定を行う必要があります。
-
- PIX4Dcatchによる撮影は、LiDAR機能が付いたiPadデバイス(iPad Pro等)の利用を推奨しています。
- Scaniverse は、詳細な設定項目はありません。
- 解像度に関する設定はなく、点群を出力する際のモードの選択が可能です。
- Modelyを用いた配筋検査に必要な点群では、Detail Mode(LiDAR だけでなくフォトグラメトリで処理するモード)を推奨しています。
- 上記の理由は、D13 などの細い鉄筋を取得するためには、フォトグラメトリの処理が必要なためです。
-
- LiDAR機能が付いたのiPadデバイス(iPad Pro等)を推奨しています。
- LiDAR機能が付いていないのiPadデバイスの利用は非推奨です。
- LiDAR機能が付いたのiPadデバイス(iPad Pro等)を推奨しています。
データ容量
- Pix4D は数 100MB、Scaniverse は数 10MB です。
- 上記のデータ容量は、本実証の撮影対象規模における結果であるため、撮影対象規模によっては 変わる可能性があります。
- Pix4D は Scaniverse に比べてデータ容量が一番大きいが、Scaniverse に比べると、点群の質は Pix4D の 方が良いです。
画像データの出力
- Pix4D は、点群撮影時に取得した画像データの出力が可能です。また、撮影した画角の軌跡も可視化されます。
- Scaniverse は、撮影時・撮影直後にLiDAR 機能で取得したデータが可視化されますが、画像デ ータは出力できません。
スケール
- Scaniverse は、点群のスケールが実際より大きくずれる場合があるため、要求精度によっては再撮影が必要になることがあります。そのため、撮影後に点群のスケールが問題ないことを確認した後に、Modely 上で 3D モデル作成・帳票作成を行うように注意する必要があります。
- Pix4D はScaniverse よりスケールが安定しやすいため、撮影の手戻りは少なくなります。
金額
- Pix4D は有料アプリです。
- 撮影自体(PIX4Dcatch)は無料で利用できますが、点群化処理(PIX4Dcloud)は有料です。
- https://www.pix4d.com/jp/pricing/pix4dcloud/
- Scaniverse は無料アプリです。
精度検証
精度検証目次
検証の流れ

計測条件
計測デバイス
点群取得には、以下のデバイス、ソフトウェアを用いました。
- デバイス:iPad Pro
- 11インチ(第3世代)
- モデル番号:A2377
- ソフトウェア:
- PIX4Dcatch (モバイルアプリ ) + PIX4Dcloud (Web アプリ)
- PIX4Dcatch を用い て、点群・写真データを取得します。その後、 PIX4Dcloud を用いて、クラウド上に取得した点群・写真データのアップロードを行い、最終的 な点群を生成します。Pix4D では、LiDAR を用いた点群とフォトグラメトリを用いた点群 (複数の写真データから生成された点群の情報)を用いて、最終的な点群が生成されます。
- Scaniverse (モバイルアプリ)
- PIX4Dcatch (モバイルアプリ ) + PIX4Dcloud (Web アプリ)
対象物体
- 検証に用いる鉄筋として、建築現場を想定した鉄筋模型(実現場の配筋を模した鉄筋モックアップ(柱、梁))を本実証用に作成しました。
- 主鉄筋は、D29またはD25、帯筋・あばら筋はD13を用いました。

撮影条件
- 各点群測定機器の使用に際し、複数の照度(照明100%:約200~900ルクス、照明50%:約50~400ルクス)において撮影を実施しました。
- 理由は、実運用では一定の照度が必要なためです。
- 型枠条件として、型枠がある場合とない場合を設定し、撮影を実施しました。
- 実際の検査現場では型枠がある状態で検査をすることもあれば、ない状態で検査を行うこともあるためです。

結果
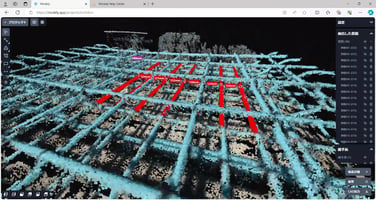
取得した点群
- Scaniverse は、柱(帯筋)の最低面付近 の帯筋については、型枠ありの場合は点群取得が難しい時があります。
- Pix4D は柱(帯筋)の最低面付近 の帯筋なども取得が可能であり、対象の鉄筋・型枠の点群に全て対して、3Dモデル化を行う上で十分な点群を、Scaniverse に比べて取得できます。
- そのため、このような複雑な鉄筋の場合は、Pix4Dの利用が推奨されます。


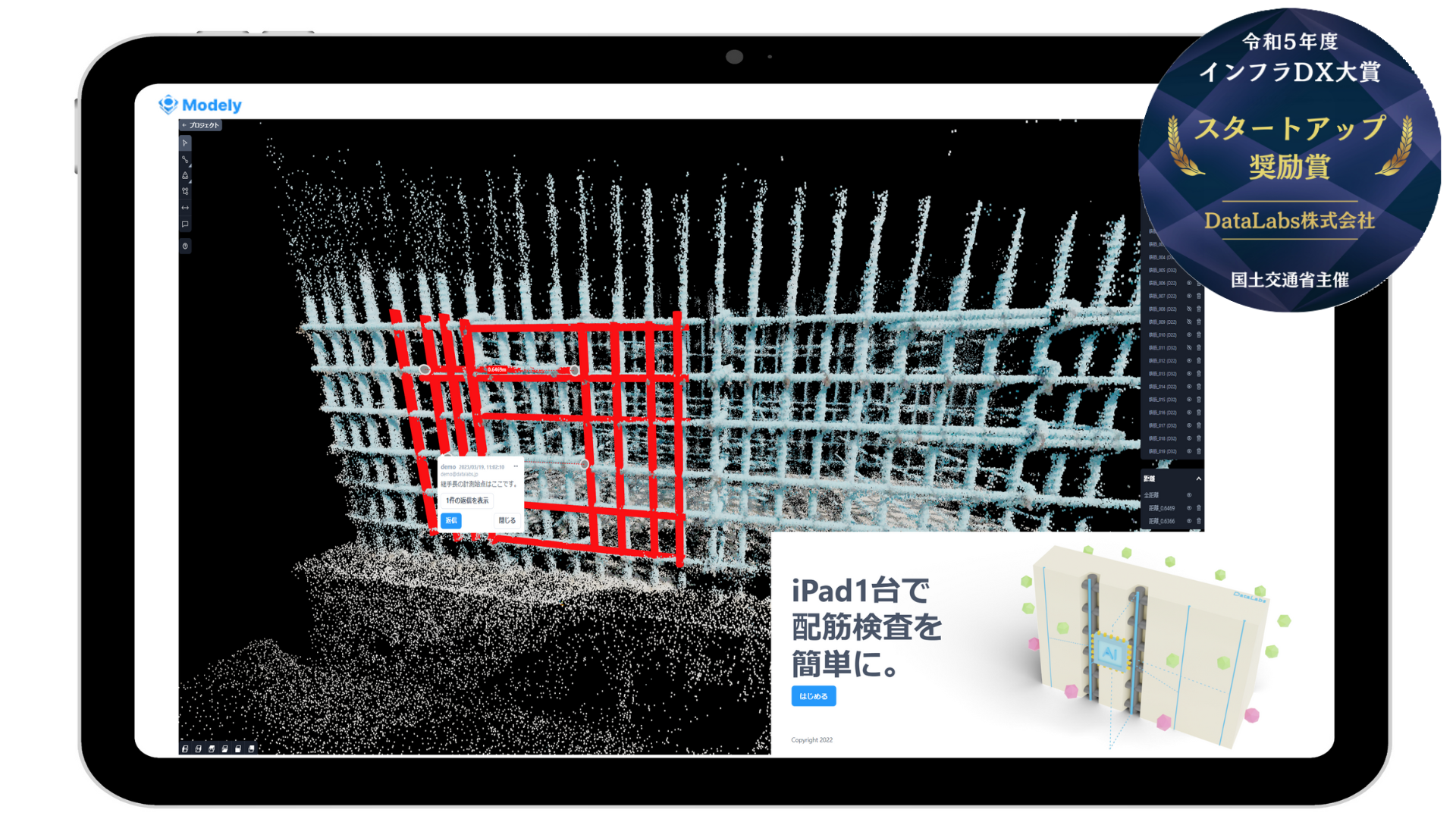
作成した3Dモデル
- Pix4DとScaniverse ともに、点群に沿って3D モデルが正しく作成されています。(定量的な評価については後述)
- Scaniverseは、柱(帯筋)の最低面付近の帯筋については、型枠ありの場合は点群取得が難しい時があるため、3Dモデル化が困難な時があります。
- そのため、このような複雑な鉄筋の場合は、Pix4Dの利用が推奨されます。


3Dモデルの鉄筋間隔・かぶり厚
- 3Dモデルの精度評価(鉄筋間隔・かぶり厚)における計測データの分布について、図1 3Dモデルの精度評価(鉄筋間隔)における計測データの分布、図2 3Dモデルの精度評価(かぶり厚)における計測データの分布に示します。
- PIX4Dcatch+PIX4DcloudとScaniverseいずれも、鉄筋間隔の相対誤差が0.3 Φ 以内、かぶり厚の相対誤差が 0.6 Φ 以内に収まっていることを確認できました。

図1 3Dモデルの精度評価(鉄筋間隔)における計測データの分布

図2 3Dモデルの精度評価(かぶり厚)における計測データの分布
照明条件での比較
- 3Dモデルの精度評価における計測条件による違い(照明条件による比較)について、図3 3Dモデルの精度評価(鉄筋間隔)における計測条件による違い(照明条件)と図4 3Dモデルの精度評価(かぶり厚)における計測条件による違い(照明条件)に示します。
- 3Dモデルの精度評価における計測条件による違い(照明条件による比較)について、照明による差異はあまりありません。
- 本実証での照度は約 50~1000 ルクスであり、労働安全衛生規則 (照度)第六百四条4に記載してある「普通の作業に必要な照度(150 ルクス以上)」を 十分満たしています。

図3 3Dモデルの精度評価(鉄筋間隔)における計測条件による違い(照明条件) 「照明100%」は約200~900ルクス、
「照明50%」は約50~400ルクスに相当する。

図4 3Dモデルの精度評価(かぶり厚)における計測条件による違い(照明条件) 「照明100%」は約200~900ルクス、
「照明50%」は約50~400ルクスに相当する。
まとめ
- 点群取得アプリのPix4D (PIX4Dcatch+PIX4Dcloud)とScaniverseの特徴や精度検証を紹介しました。
- 精度検証は、それらのアプリで取得した点群をもとに3D配筋検査システムModelyを用いて、作成した3Dモデルを用いて行いました。
- 柱・梁の鉄筋に対して点群データを取得し、点群データから3Dモデルを作成することで、鉄筋の配筋検査項目である鉄筋間隔、かぶり厚の精度を評価しました。
- Pix4D (PIX4Dcatch+PIX4Dcloud)とScaniverseによる比較や照度の条件による比較も行い、鉄筋間隔が相対誤差0.3Φ以内、かぶり厚が相対誤差0.6Φ以内の結果を得ることができました(ただし、Φは鉄筋径)。
- 点群取得アプリによる配筋検査や点群データの活用、Modelyにご興味がある方は以下よりお問い合わせください。
3D配筋検査システムModely
特別ウェビナー開催!
2/19(水)14:00~15:00にてHatsuly導入企業からの実際にHatsulyを使用した感想を聞ける特別ウェビナーを開催予定!詳細は以下のリンクをご確認ください!

3D配筋検査システムModelyについて、詳しく知りたい方は以下をご参照ください。

お問い合わせ
参考文献
- PIX4Dcatch: https://www.pix4d.com/jp/product/pix4dcatch/
- PIX4Dcloud: https://www.pix4d.com/jp/product/pix4dcloud/
- Scaniverse: https://scaniverse.com/
- 労働安全衛生規則 (照度)第六百四条:https://elaws.e-gov.go.jp/document?lawid=347M50002000032